



Description
Long Description:
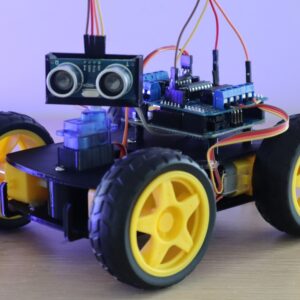
A 6-Wheel Mobile Controlled Rover is a versatile robot designed to be remotely controlled using a mobile device, typically over Wi-Fi or Bluetooth via the ESP32 microcontroller. The rover is equipped with six DC motors, each powering a wheel, allowing for greater traction and stability over uneven terrain. This type of rover can be used in educational projects, robotics competitions, and DIY hobby projects. The control interface is a mobile app, which communicates wirelessly with the ESP32 to send commands for movement. The motors are controlled by a motor driver (e.g., L298N or L293D), and the entire system is powered by a battery pack.
- ESP32 Microcontroller: The ESP32 serves as the brain of the rover. It’s a powerful microcontroller with integrated Wi-Fi and Bluetooth, enabling wireless communication with a mobile app. The ESP32 processes commands from the app and sends signals to the motor driver to control the rover’s movements. Additionally, it can be programmed using the Arduino IDE or ESP-IDF, making it flexible for different control setups and features like obstacle avoidance or camera integration.
- 6 DC Motors (Wheel Control): The rover uses six DC motors, each driving one of the wheels. This configuration provides enhanced traction and stability, especially on rough or uneven surfaces. The motors are connected to the motor driver, which controls their speed and direction based on the signals received from the ESP32. The six-wheel design is common in off-road rovers because it distributes the load more evenly, making it suitable for challenging environments.
- Motor Driver (L298N or L293D): A motor driver such as the L298N or L293D is used to control the six DC motors. The motor driver acts as an H-Bridge, allowing the ESP32 to independently control the speed and direction of each motor. For a 6-wheel rover, the motors can be grouped into pairs (left side, right side) for coordinated movement, or each motor can be controlled individually for more complex maneuvers.
- Mobile App Control (Wi-Fi or Bluetooth): The ESP32 allows for wireless control of the rover via either Wi-Fi or Bluetooth. A custom mobile app can be developed (or pre-made apps used) to send commands to the rover, such as moving forward, backward, turning left, or turning right. The app communicates with the ESP32, and the microcontroller translates these commands into motor control signals. This wireless interface eliminates the need for a physical connection, offering greater flexibility and range for control.
- Chassis with 6 Wheels: The rover’s chassis is designed to house the motors, electronics, and battery, while providing a sturdy platform for the wheels. A 6-wheel design offers greater traction and load-bearing capability compared to standard 4-wheel rovers, making it ideal for off-road or exploration applications. The wheels can be made from rubber or other durable materials to handle different terrains.
- Power Supply (Battery Pack): The rover is powered by a battery pack, typically using rechargeable Li-ion batteries or AA batteries. The power supply must be sufficient to drive the six motors and the ESP32. Depending on the rover’s size and intended use, a larger battery may be required for longer operational time and to handle the current demands of the motors.
- Control Algorithm: The rover’s movements are controlled by the ESP32 based on the commands received from the mobile app. The control algorithm reads the inputs from the app (e.g., forward, backward, left, right) and adjusts the speed and direction of the motors accordingly. For example, to turn left, the motors on the right side of the rover will run faster than those on the left side. This algorithm can also be expanded to include additional features such as obstacle detection (using ultrasonic sensors) or autonomous navigation.
How It Works:
- The mobile app sends control commands (via Wi-Fi or Bluetooth) to the ESP32, such as moving forward, backward, left, or right.
- The ESP32 processes these commands and sends signals to the motor driver to control the speed and direction of the six DC motors.
- The motor driver controls the DC motors based on the input from the ESP32, allowing the rover to move as commanded.
- The 6-wheel configuration provides stability and traction, making the rover capable of navigating rough terrain.
- The power supply provides the necessary energy for the ESP32 and motors to function.
Applications:
- Exploration: The 6-wheel design makes the rover ideal for off-road exploration or outdoor robotics applications, where terrain may be uneven or difficult to navigate.
- Robotics Competitions: The mobile-controlled rover can be used in various robotics competitions that require wireless control and obstacle navigation.
- Educational Projects: This project introduces students to wireless communication (Wi-Fi/Bluetooth), motor control, and robotics, making it a valuable educational tool.
- DIY Robotics: It’s a popular choice for hobbyists who want to build their own off-road rover with wireless control and flexibility in movement.
Advantages:
- Wireless Control: The use of ESP32 for Wi-Fi or Bluetooth control provides flexibility in managing the rover without being tethered to a physical controller.
- 6-Wheel Stability: The 6-wheel design offers better stability and traction on various surfaces, making it suitable for off-road or rough environments.
- Expandable Design: The ESP32 allows for easy expansion of features, such as integrating additional sensors (like ultrasonic or cameras) for more complex tasks like obstacle detection or autonomous navigation.
- Educational Value: This project teaches essential concepts in robotics, such as wireless communication, motor control, and algorithmic decision-making.
In summary, a 6-Wheel Mobile Controlled Rover based on ESP32 is a versatile and powerful project that combines wireless control with rugged design, suitable for off-road exploration, educational purposes, and DIY robotics. The integration of Wi-Fi or Bluetooth control via a mobile app provides a modern and user-friendly interface, while the 6-wheel configuration ensures stability and reliable movement over various terrains.



Reviews
There are no reviews yet.